
Confined spaces:can be used within confined or hazardous environments, where humans are not normally foreseen.
No man entry:the product can be used in areas so narrow that man cannot pass through.
No man risk:the product does not cause explosions or toxic fumes in the working area.

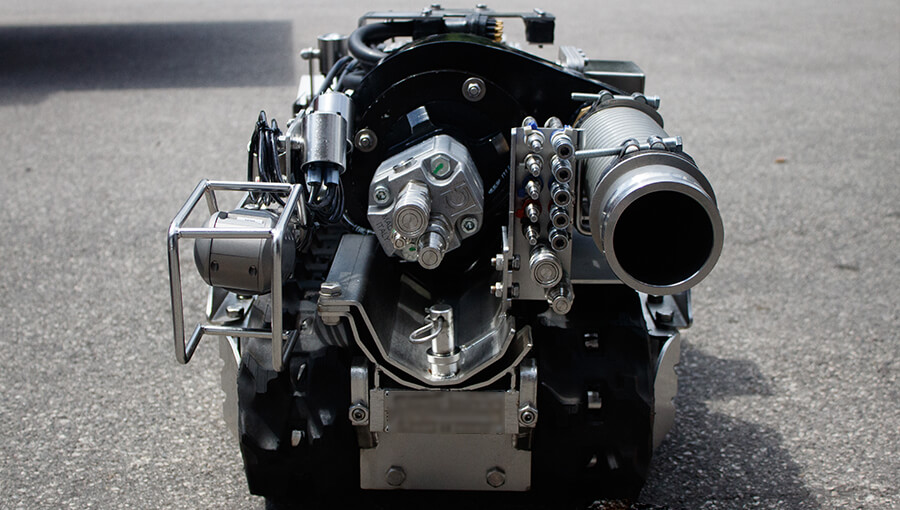
Centrifugal pump on board
Pump with a capacity of 100 [mc/h] and a suction lift up to 7 [mt]. It can suck up solids with a diameter up to 50 [mm].
Stainless steel construction
The robot is made of steel (AISI 316) including the auger's cylinder and quick couplings placed at the back of the machine.
Underwater Cameras
A CCTV system consisting of the LED lights and submersible cameras for a crisp view of cleaning operations.
Umbilical up to 100 [mt]
Four lengths available (25, 50, 75, 100 [mt]) with 13 hydraulic hoses and 1 electric cable.
Remote control system
Electrical-on-hydraulic configuration with proportional and compensated controls via wireless transmitter.





Tracks with magnetic inserts

Rubber Tracks with picks

Rubber tracks

Magnetic force boost kit

Counterweights

Gerotto Remote Control System

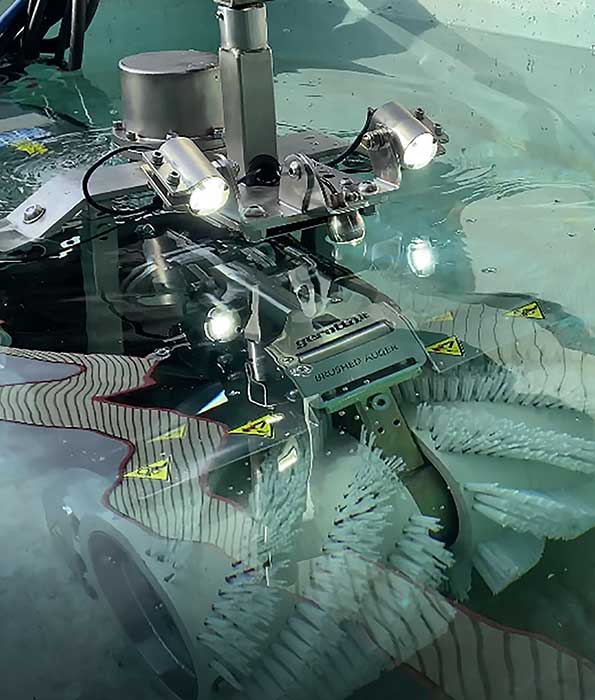
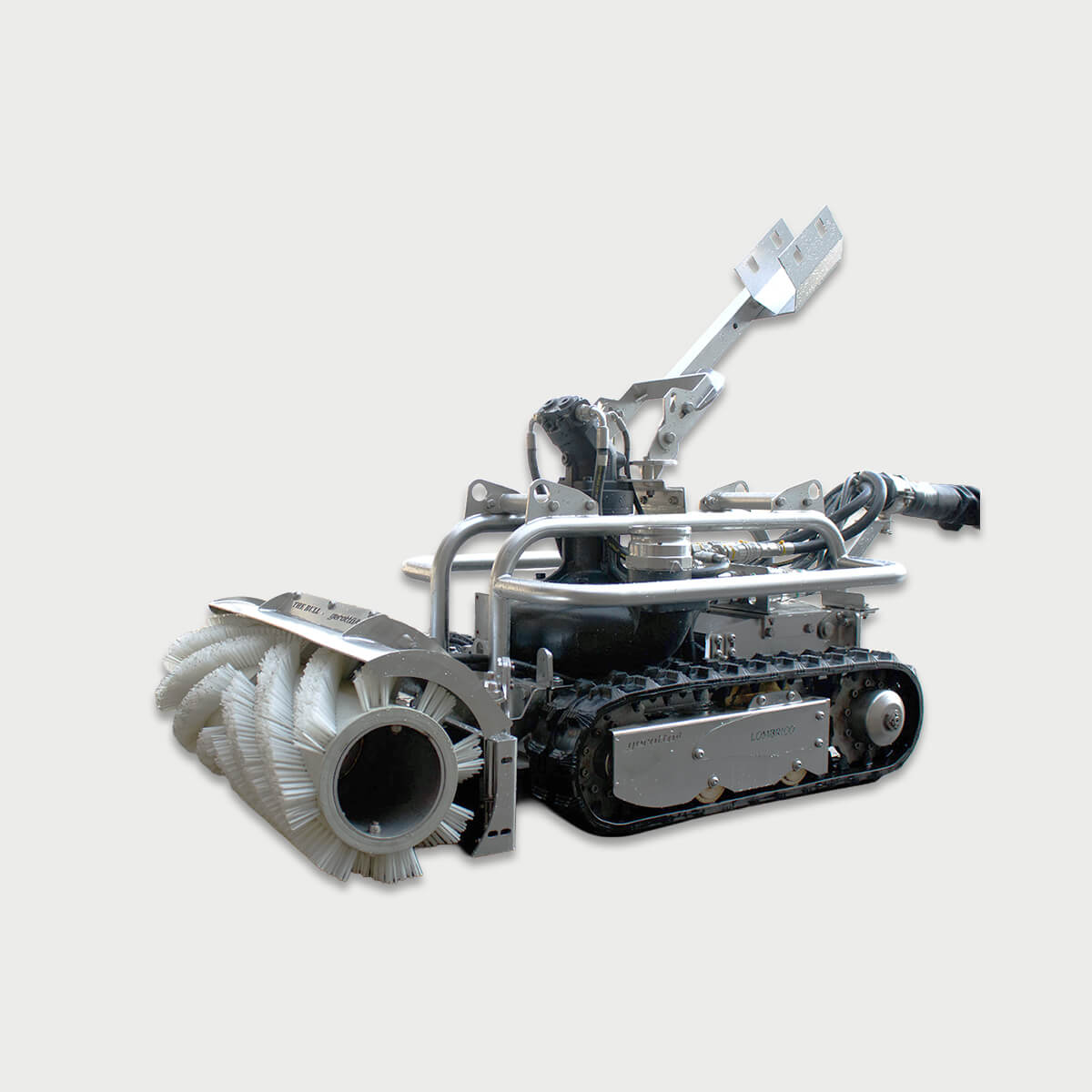
Brushed drums





Gerotto receives the "Value of Enterprise" award
Continue reading


CCTV Standard
Video inspection system consisting of cameras, LED lights, monitors for safe remote operation

CCTV ATEX and IECEx
An ATEX and IECEx CCTV system consisting of cameras, LEDs, and monitors for complete remote control of the robots.
